Groundhog Beta
Innovation Award Winner and 2nd Place
@ NOT-A-BORING-COMPETITION 2023, Bastrop, TX, USA

2nd Version Erosion Component
Steering Component
2nd Version Liner Component
Propulsion Component
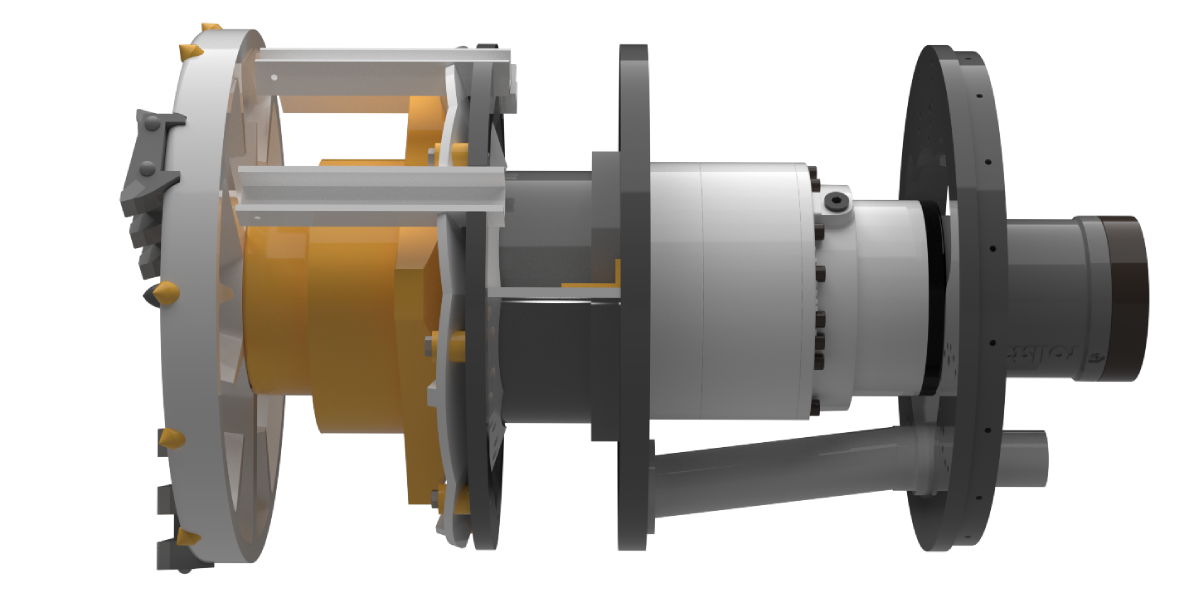
The brand new Erosion system is designed to adapt to the sticky clay ground conditions of Bastrop, Texas. In order to deal with the high plasticity clay, the system is equipped with a ground conditioning mechanism, which pumps a special foam to the front of the machine in order to change the cohesive and adhesive characteristics of the soil. This highly raises the efficiency of our suctioning mechanism compared to Groundhog Alpha. Furthermore, the Erosion system is able to deal with tougher rocks with a torque of 9.5kNm and a rotational speed of 12rpm. This ensures that larger rocks and pebbles are crushed into smaller pieces, so that they can be suctioned in by the Venturi pump, located at the heart of our machine.
Steering
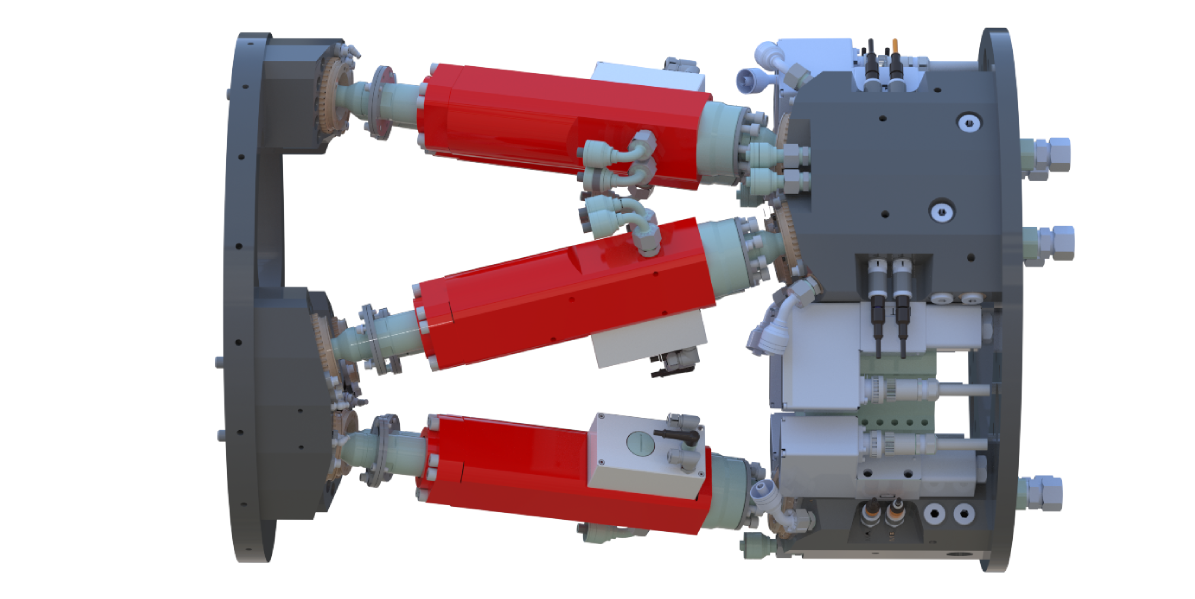
The navigation system is composed of two parts. The first is the steering mechanism, an innovative custom-made hydraulic hexapod system allowing us to dig curved tunnels. Using six hydraulic high-precision cylinders, it allows us to move in six degrees of freedom. Furthermore, utilizing custom software, it is possible to use this setup as a jackhammer, allowing for strong vibrations of frequencies as high as 20Hz. Besides that, thanks to the eighty-five sensors the navigation system houses in total, we can guide the machine autonomously with the accuracy of a few millimeters.
Liner
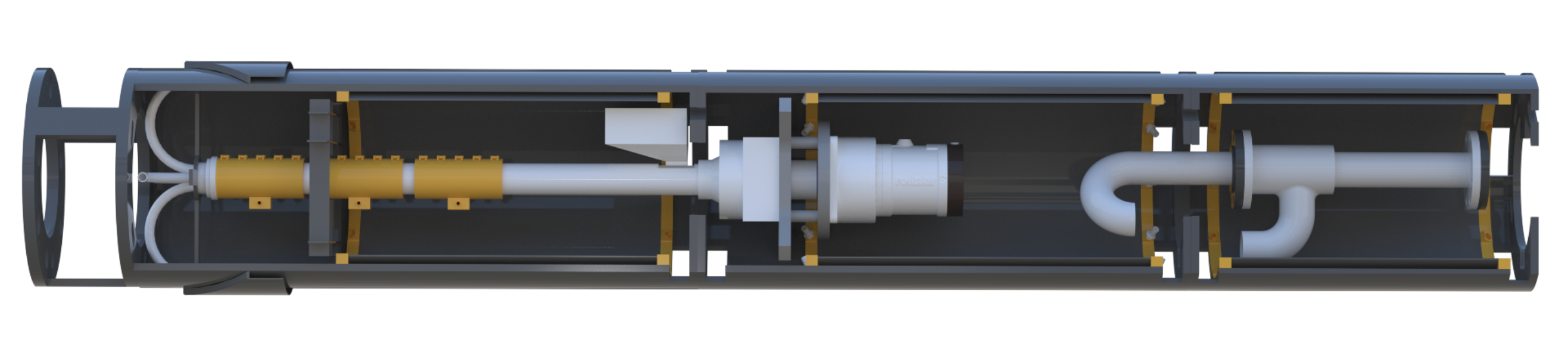
The new tunnel lining system continuously extrudes a 15mm thick pipe directly inside the tunnel, being made out of a specially designed thermoplastic polymer to fulfill the extreme thermal requirements. The system consists of the extruder inside the machine, which melts polymer and presses it through a mold into the correct form. Additionally, a heating and a cooling system bring the polymer to the optimal temperature. Outside of the machine, the pneumatic system transports the polymer in granular form into the machine with pressurized air at a speed of 70 km/h. A cooling aggregate provides water to remove the heat from the polymer so that it reaches the required strength. Only thanks to the new lining system are we able to continuously line the tunnel wall and thus build a tunnel without interrupting the boring process. This is a significant advantage, especially compared to conventional tunnel boring machines.
Propulsion
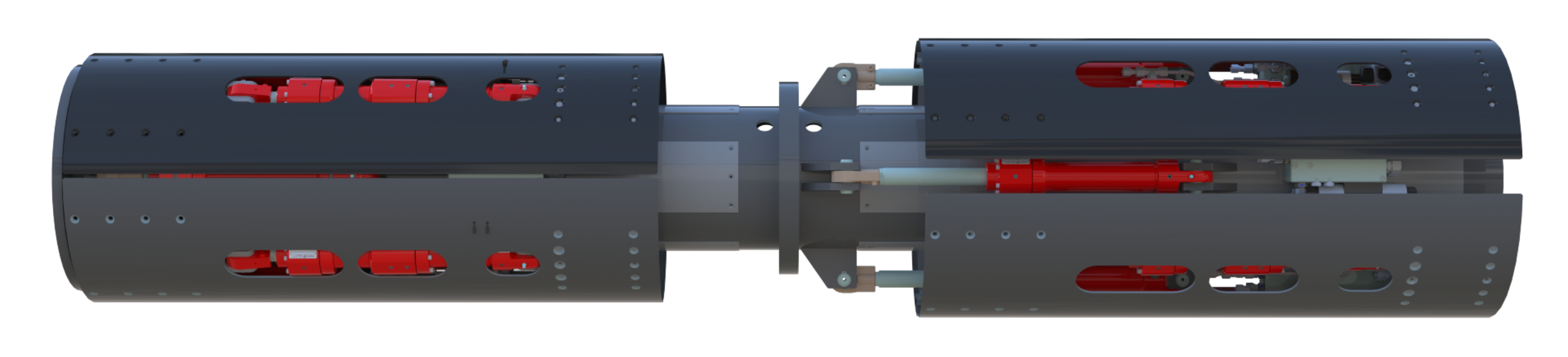
The second part of the navigation system is the propulsion mechanism. The coordinated action of sixteen high-performance hydraulic cylinders and eight gripper plates pressing against the tunnel wall allows for continuous machine movement with 200kN of force.
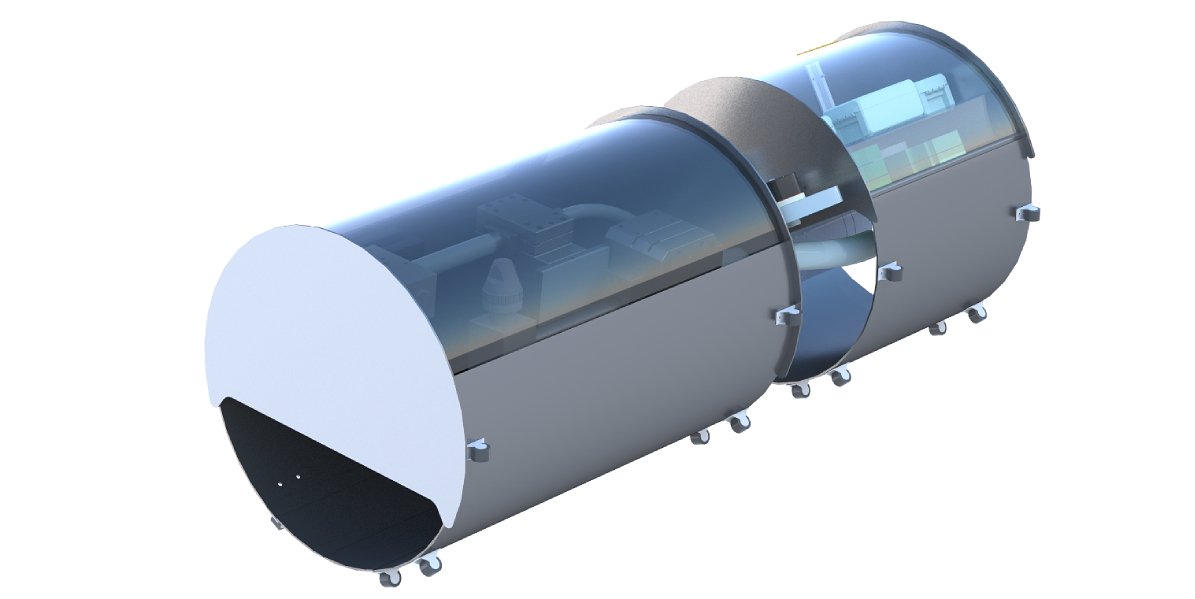
Butler
The Butler is the first part of the supply carriage convoy behind the MTBM. It houses crucial electronics such as power amplifiers and sensor boards, as well as the wheel encoder bundle, which measures the digging distance. The Butler also preceeds the hydraulics block that acts as a valve between outer and inner hydraulics hoses.
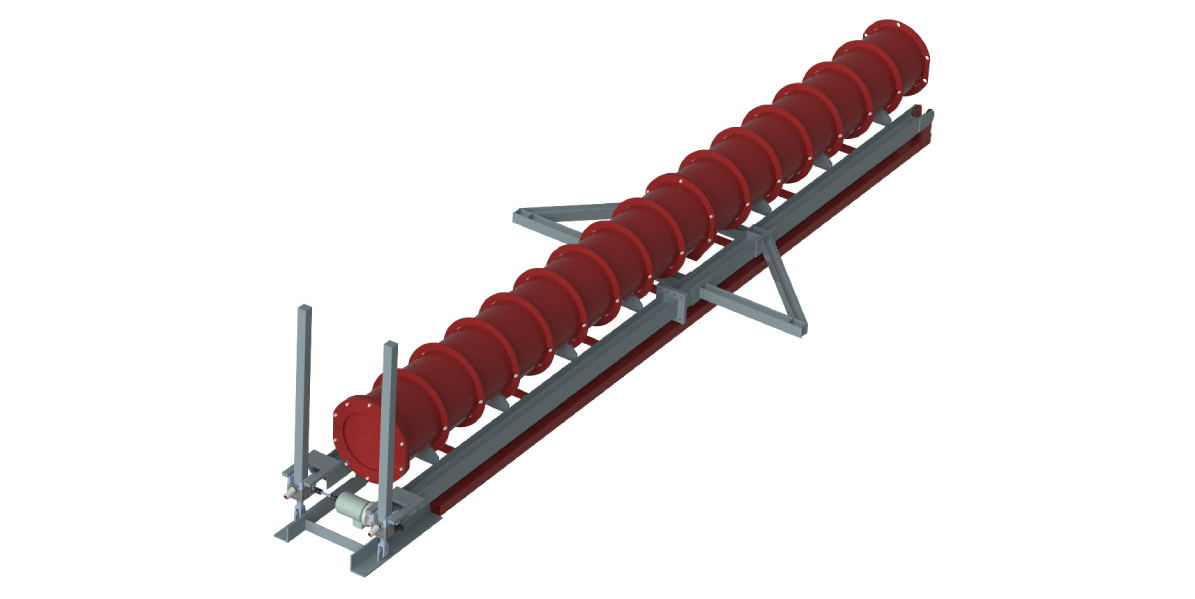
Starting Platform
Building upon the success of the first version of the starting platform, for our second iteration, we added the ability to change the angle of the starting platform to enable different launch positions. This allows us to launch directly from the surface without digging a starting pit first and thus saving valuable time. If desired however, it is still possible to start from such a starting pit by for example angling the platform horizontally. The starting platform initially takes all the propulsion forces up until the gripper plates of the propulsion system are fully inside the tunnel and guide the machine into the ground along the tunnel lining.
Software
Albeit invisible, software is the crucial interface between engineer and machine, facilitating interaction with the MTBM while it is underground. The Groundhog Beta software stack consists of a backend that houses the control code and orchestrate each state machine, a frontend used for real time telemetry and machine control, a data platform for persistent storage and analysis of production data, and DevOps to keep the workflows neat. In parallel, we write embedded software that runs on the custom subsystem control units that connect to the sensors and actuators.

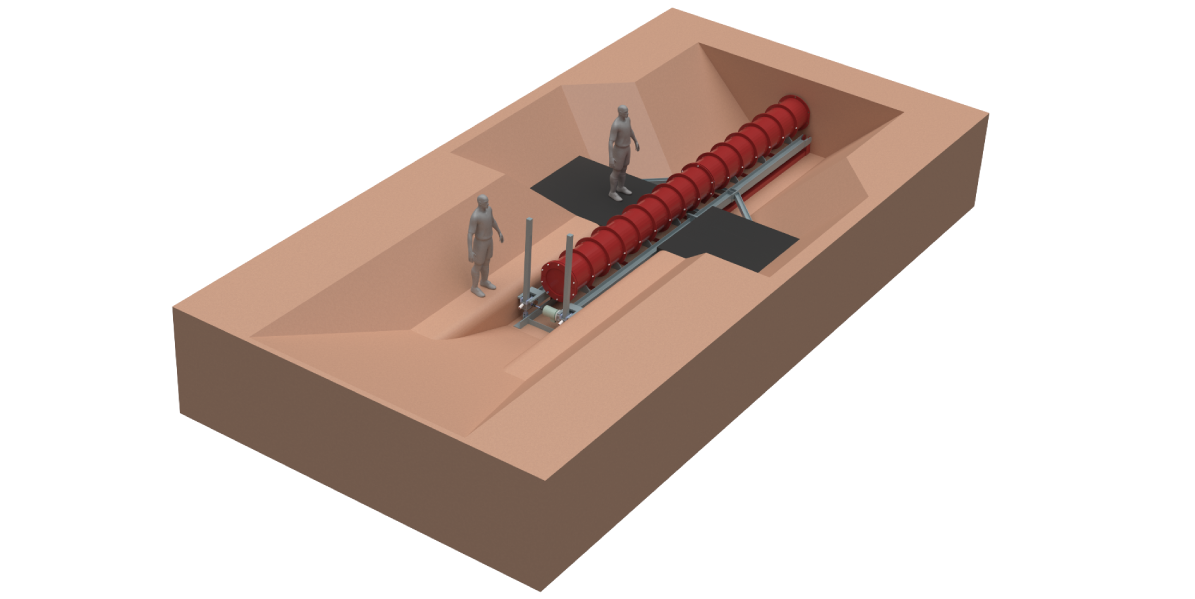
Launching Area
The launching area has been carefully planned to accommodate all periphery structures and infrastructure to ensure a flawless MTBM launching procedure. We try to find a balance between the engineer-friendliness for servicing, troubleshooting and operation, and efficiency for equipment placement. For the launching area, we have to precisely place the launching platform, the servicing stations, the software/electronics workspace, the settlement tank, the team container, the hydraulics aggregate, the polymer silo, the folded MTBM cables/hoses, and the generator, while ensuring enough space for safe heavy equipment operation. Afterwards, we find an optimal layout, print the necessary plans and bring it to life on the actual competition site.